Si tratta di un robot morbido sviluppato dai ricercatori del MIT e di Stanford, una macchina a forma di liana in grado di sollevare oggetti fragili e persino corpi umani. Per decenni, e ancora di più negli ultimi anni e persino mesi, la robotica ha fatto passi da gigante in termini di forza, precisione e velocità, ma ha continuato a fallire su un punto critico: il contatto delicato con il mondo reale. Dalle fabbriche agli ospedali, la maggior parte dei robot continua a dipendere da pinze rigide, bracci articolati e pinze che funzionano bene con i pezzi industriali, ma non con oggetti fragili o corpi umani. Negli ultimi anni, la robotica morbida ha cercato di colmare questa lacuna, ispirandosi agli animali, ai tessuti viventi e persino alle piante.
In questo contesto si colloca il nuovo sistema sviluppato dagli ingegneri del MIT e dell’Università di Stanford, che consiste in un robot a forma di liana che non “afferra” nel senso classico del termine, ma si dispiega, scivola e si avvolge attorno agli oggetti. L’idea non è quella di stringere, ma di avvolgere, in un cambiamento concettuale che apre la porta a usi prima impensabili per un robot.
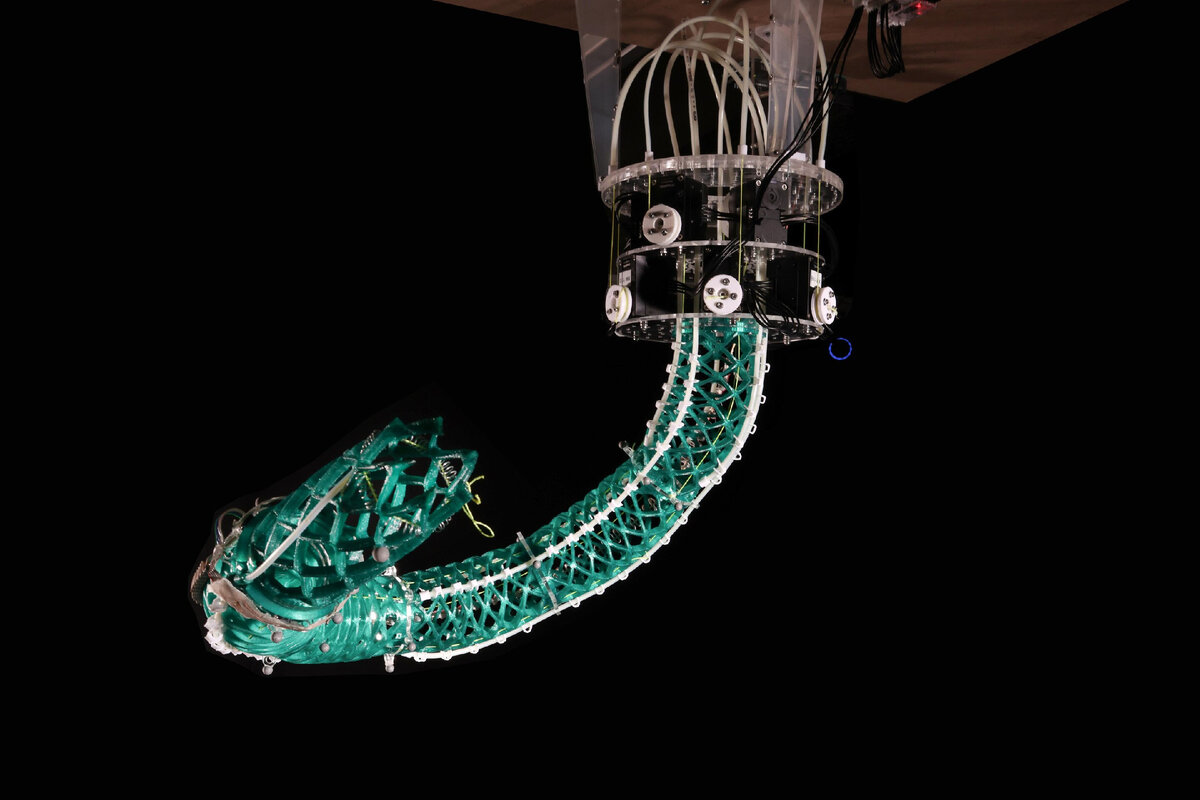
Il design si basa su una serie di tubi pneumatici flessibili che emergono da una scatola pressurizzata installata su un braccio robotico che funziona tramite pressione dell’aria, poiché questi tubi possono serpeggiare sotto o intorno a un oggetto, anche in spazi molto stretti. Una volta raggiunto l’altro lato, i tubi si fissano nuovamente al braccio, chiudendo un anello che consente di sollevare, ruotare o spostare il carico con grande stabilità.
A differenza di altri robot ispirati ai rampicanti sviluppati nell’ultimo decennio, questo sistema può dispiegare e recuperare attivamente i propri “viticci”, consentendo di alternare anelli aperti e chiusi a seconda della fase dell’attività. Come spiega Kentaro Barhydt, coautore dello studio e ingegnere meccanico del MIT, il gesto apparentemente semplice di “afferrare” un oggetto è in realtà un processo complesso. Prima bisogna posizionarsi, poi circondare l’oggetto e infine assicurarne la presa. Separando queste fasi e consentendo al robot di cambiare configurazione al volo, il sistema raggiunge un livello di controllo che non è usuale nella robotica convenzionale.
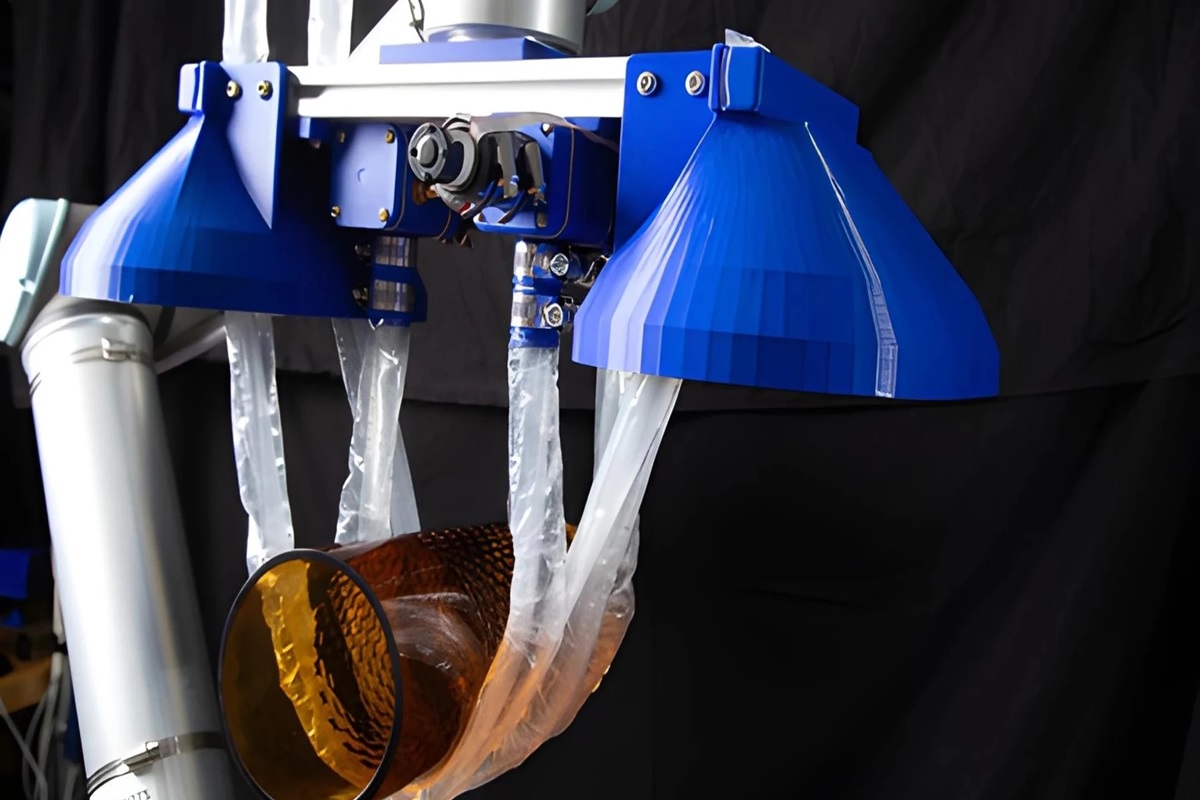
Secondo quanto pubblicato da New Atlas, nei test di laboratorio, il team ha dimostrato la versatilità del robot affrontando scenari molto diversi in cui è stato in grado di sollevare oggetti rotondi, manipolare pezzi in ambienti disordinati, sostenere un vaso di vetro senza romperlo, spostare grandi carichi a distanza e raccogliere gruppi di oggetti contemporaneamente, riuscendo persino a manipolare elementi pesanti e di forma irregolare, come un’anguria, senza danneggiarli. Ogni dimostrazione puntava alla stessa idea: il robot non dipende da una forza puntuale, ma da una distribuzione morbida e adattabile del contatto.
Quando la robotica morbida entra in ospedale
Il vero potenziale del sistema, tuttavia, emerge al di fuori del laboratorio, poiché i ricercatori sottolineano che una delle applicazioni più promettenti è nel campo sanitario, in particolare negli ospedali e nei centri di assistenza agli anziani. Attualmente, infatti, spostare un paziente comporta spesso girarlo su un fianco per posizionare un lenzuolo a forma di amaca che viene poi sollevato con un argano, un processo che può essere doloroso, interferire con le vie endovenose e generare stress sia nel paziente che nel personale sanitario.
Il robot a forma di liana offre un’alternativa radicalmente diversa, poiché i suoi tubi possono scivolare sotto il corpo del paziente senza bisogno di sollevarlo preventivamente, avvolgendolo in modo uniforme e riducendo i punti di pressione, il che consentirebbe trasferimenti più delicati, controllati e potenzialmente più sicuri. Per Allison Okamura, coautrice dello studio di Stanford, questo tipo di robot rappresenta un modo più realistico e umano rispetto ai robot umanoidi per assistere fisicamente le persone con mobilità ridotta.
Inoltre, al di là dell’ambito medico, il team sottolinea che il design è adattabile a molteplici settori che vanno dall’industria pesante all’automazione delle gru nei porti e nei magazzini: qualsiasi ambiente in cui sia necessario movimentare carichi pesanti, irregolari o delicati potrebbe trarre vantaggio da un sistema che combina flessibilità, portata e controllo. La ricerca si aggiunge a una tendenza crescente che cerca robot meno rigidi e più “biologici” nel loro modo di interagire con l’ambiente.





